
Jiaqi Wang
Now I'm a master's student in Biomedical Engineering at National University of Singapore(NUS) and I'm looking for job opportunities about AI related jobs!
I have completed my two years full-time research assistantship at the Chinese University of Hong Kong,Shenzhen(CUHKSZ) focusing on research in the direction of micro medical robotics.
Previously, I obtained my B.S. in Mechanical Design Manufacture and Automation at XIDIAN University(XDU) in 2022, advised by Professor Pei Wang.
Please find my CV here.
What's
New
[MAY 2024] Testing the generalizability and effectiveness of deep learning models among clinics: sperm detection as a pilot study is accepted to Reproductive Biology
and Endocrinology!
[JAN 2024] Automated Non-invasive Analysis of Motile Sperms Using Cross-scale Guidance Network is accepted to ICRA 2024!
[Dec 2022] Estimating End-Effector 3D Position using a Single Monocular Microscopic Image for Robotic Micromanipulation is accepted to ROBIO 2022!
[Nov 2022] Estimating Z-position of Motile Cells for Robotic Cell Manipulation is accepted to IEEE CBS 2022!
[Nov 2022] Machine Learning-based Depth Prediction of End-Effector for 3D Robotic Micromanipulation is accepted to IEEE CBS 2022!
[Oct 2022] I obtained the Video Presentation Award-Second Place at the American Society for Reproductive Medicine's 78th ASRM Scientific Congress & Expo!
This is the most prestigious reproductive medicine conference in the United States! And the abstracts are published in FERTILITY AND STERILITY, the top journal in reproductive medicine.
[Jun 2022] I obtained my B.S. in Mechanical Design Manufacture and Automatio at XIDIAN University(XDU).
Research
Experience
Below are my research experience and industry projects.
-
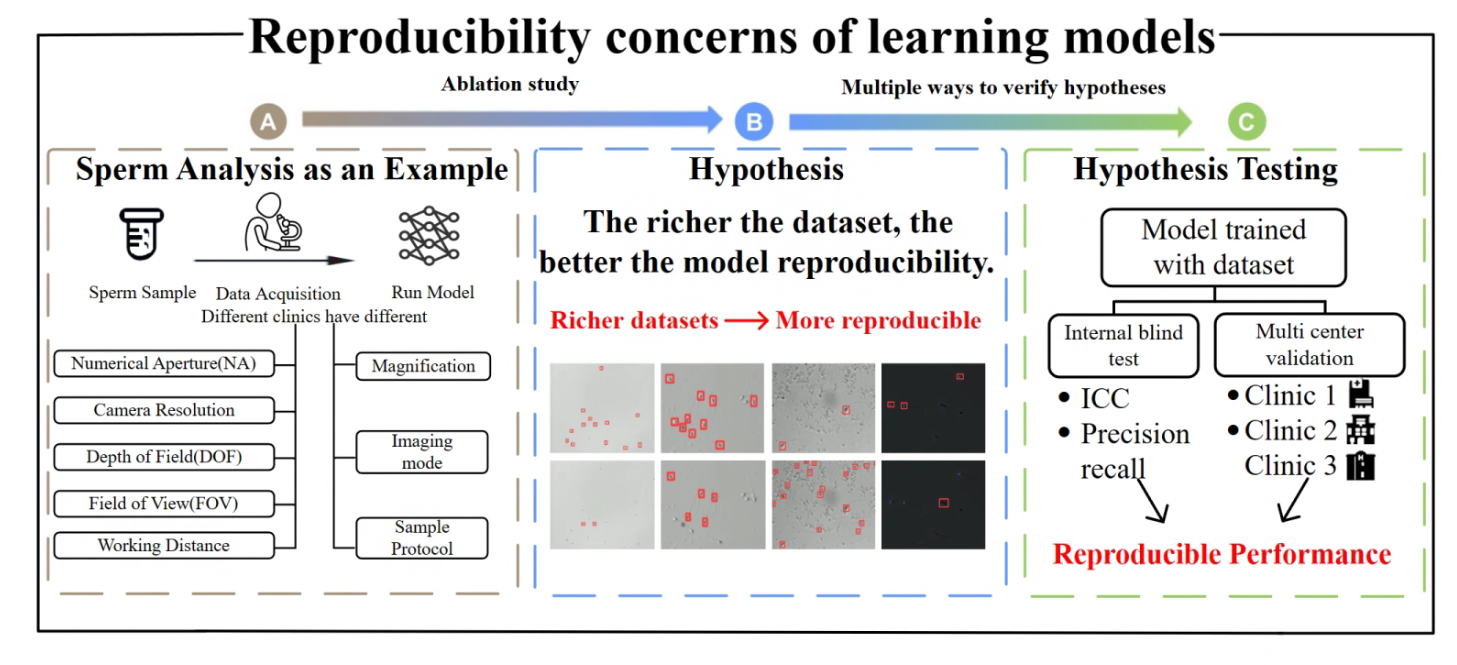
Testing the generalizability and effectiveness of deep learning models among clinics: sperm detection as a pilot study
Reproductive Biology and Endocrinology
Jiaqi Wang, Yufei Jin, Aojun jiang, et al. Task: Enhancing deep learning models for sperm detection and counting in in vitro fertilization (IVF) procedures.
What: Conducting a multicentric clinical validation to address the challenge of model reproducibility across varied clinical settings in IVF.
Benefits: Improved clinical outcomes and enhanced reliability in IVF procedures.
How: By examining the impact of imaging factors, enriching the training dataset with diverse imaging conditions, and ensuring a balanced representation of relevant objects, the study demonstrates the importance of dataset diversity and comprehensive feature sets for consistent model performance. This approach enhances model reproducibility and clinical reliability in IVF laboratories. -

Identifying Viability of Immotile Sperm at One Glance: Sperm Viability Classifier Powered by Deep Learning
Fertility and Sterility
Aojun Jiang, Jiaqi Wang, Huan Zhao, Zhuoran Zhang, Yu Sun Task: Developing an AI-based technique to non-invasively predict the viability of immotile sperm using a single brightfield image, without requiring sample processing.
What: Testing the hypothesis that viability information can be reflected by sperm morphology in microscopic images and developing an AI model for viability prediction.
Benefits: Non-invasive prediction of sperm viability, eliminating the need for cytotoxic reagents or tedious procedures. Enables instant viability information for infertility diagnosis and IVF treatment.
How: The AI model is built using the structure of Vision Transformer and trained on 1471 images of immotile sperm. The model predicts viability based on the brightfield image and is validated using blind tests on 10 new samples. Model performance is quantified by accuracy, recall, and specificity. The weights of the model are analyzed and visualized to understand its attention to different parts of the sperm, revealing that morphological changes related to viability primarily exist in the cell nucleus. -
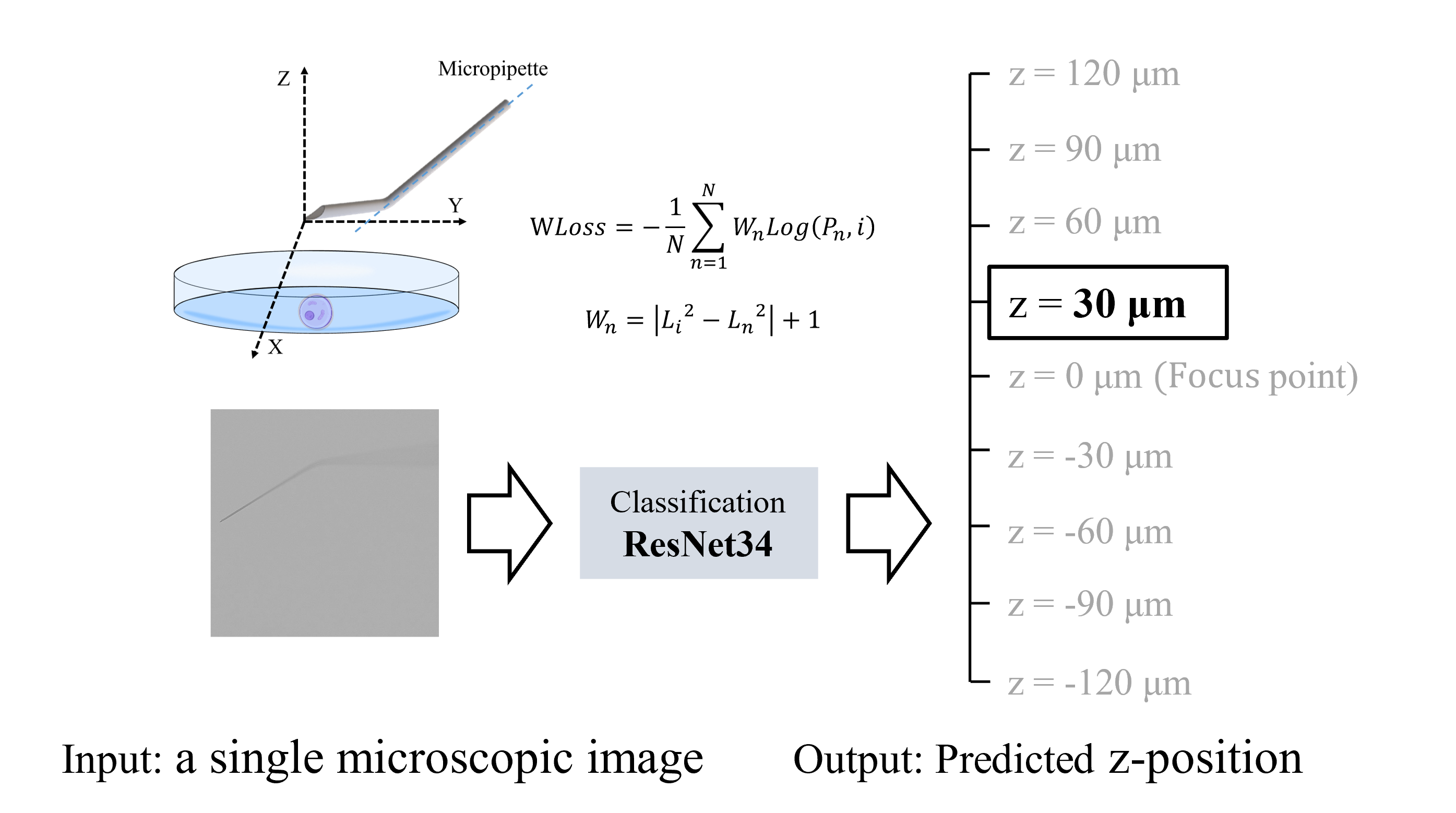
Automated positioning during microscopic sperm selection
IEEE ROBIO; IEEE CBS
Jiaqi Wang, Jiaqi Chen, Chenjie Wang, Zhuoran Zhang Task:Estimating the z-axis position of a robot end-effector using a multiclass classification approach.
What: The paper proposes a strategy to transform the z-axis positioning problem into a multiclass classification problem by classifying monocular images of the end-effector into different depth intervals.
Benefits: The proposed strategy provides a method to estimate the out-of-focus depth of the end-effector and offer 3D visual feedback for robotic micromanipulation. It overcomes the challenge of obtaining visual feedback for the z-axis position, which is crucial in robot micromanipulation.
How: A deep learning model is developed to solve the multiclass classification problem, and a novel loss function is introduced to handle the shallow depth of field of an optical microscope. Experimental results using glass micropipettes demonstrate a high accuracy of 96.1% for depth prediction/classification. -
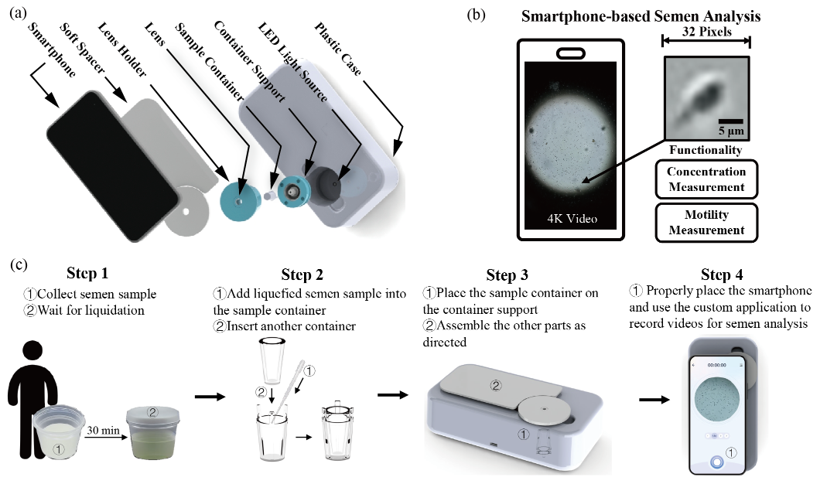
Automated Point-of-Care Semen Analysis Using Smartphone Imaging and Occlusion-Aware Multi-Object Tracking
IEEE Transactions on Automation Science and Engineering
Aojun Jiang, Miao Hao, Yiqian Li, Jiaqi Wang et al. Introduction:This paper presents an automated point-of-care semen analysis method that utilizes smartphone imaging to measure sperm concentration and motility. The method aims to match clinical standards while offering user-friendly operation. A boundary-sensitive segmentation network is developed to identify and differentiate sperm from impurities in raw semen. To address challenges posed by smartphone imaging and undiluted semen samples, a novel occlusion-aware multisperm tracking algorithm is proposed. An occlusion-awareness module is introduced to robustly track multiple sperm and handle frequent sperm crossover/occlusion. The proposed method achieves a high success rate for tracking occluded sperm and demonstrates low errors in sperm concentration and motility. In clinical tests involving 50 participants, the method shows good agreement with clinical standards and performs well even when used by inexperienced users.
-
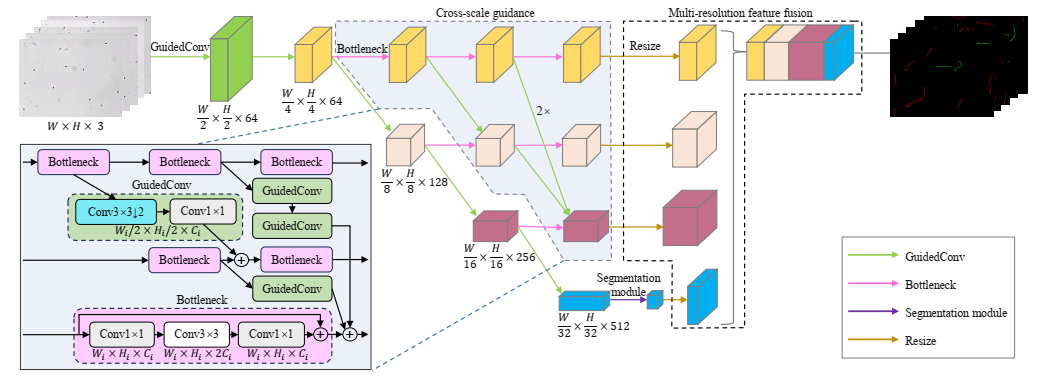
Automated Non-invasive Analysis of Motile Sperms Using Cross-scale Guidance Network
IEEE International Conference on Robotics and Automation 2024
Wei Dai, Zixuan Wu, Jiaqi Wang, Rui Liu, Tianyi Wu et al. Introduction:Accurate measurement of sperm parameters is crucial for fertility assessment and robotic manipulation. Conventional methods struggle to analyze small sperm objects, but the CSG network, a novel segmentation network, addresses these limitations. It preserves essential details using innovative modules and outperforms state-of-the-art models, achieving higher accuracy and enabling comprehensive fertility analysis.
-
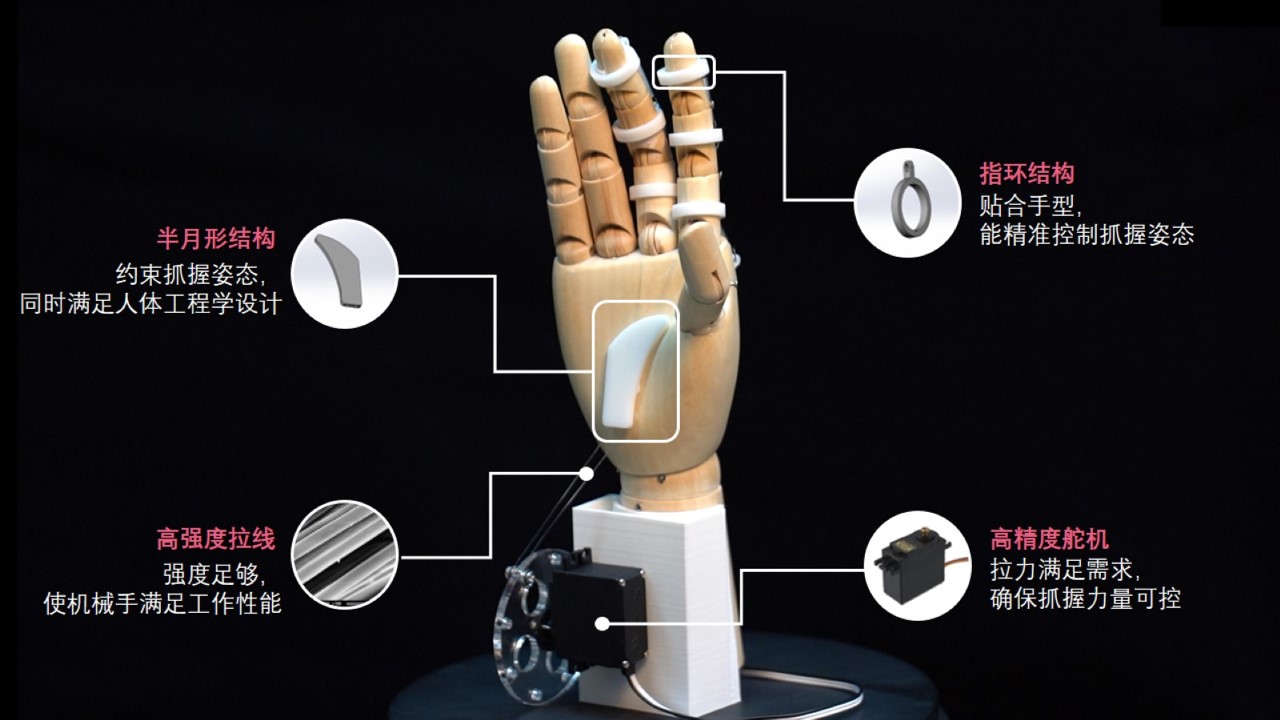
Somatosensory Wearable Mechanical Gloves
XIDIAN University May 2020 - Dec 2021
China Mechanical Innovation Design Competition
First Prize (Top 5%)What: Assistive gloves for the elderly.
How: Traditional mechanical designs for grip-assisting gloves typically utilize a linkage mechanism for power transmission. However, considering the dexterity of wearable devices, we have optimized the driving mechanism by using a cable-driven system. This driving method not only saves a significant amount of space but also provides greater flexibility. Additionally, to make it more convenient for the elderly to operate, we have incorporated a voice control module, enabling simple commands to perform gripping actions.
You can find more details here. -
-
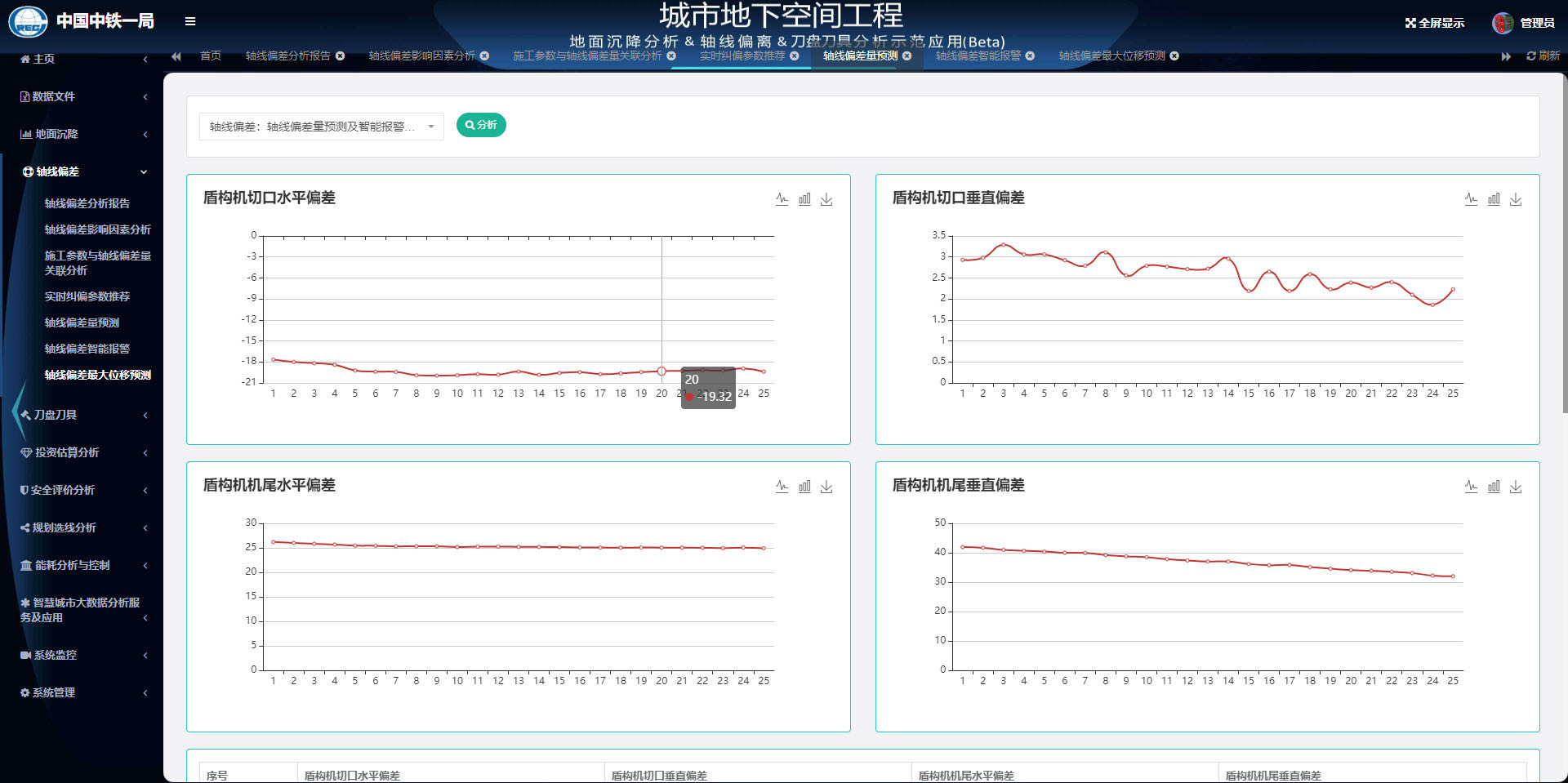
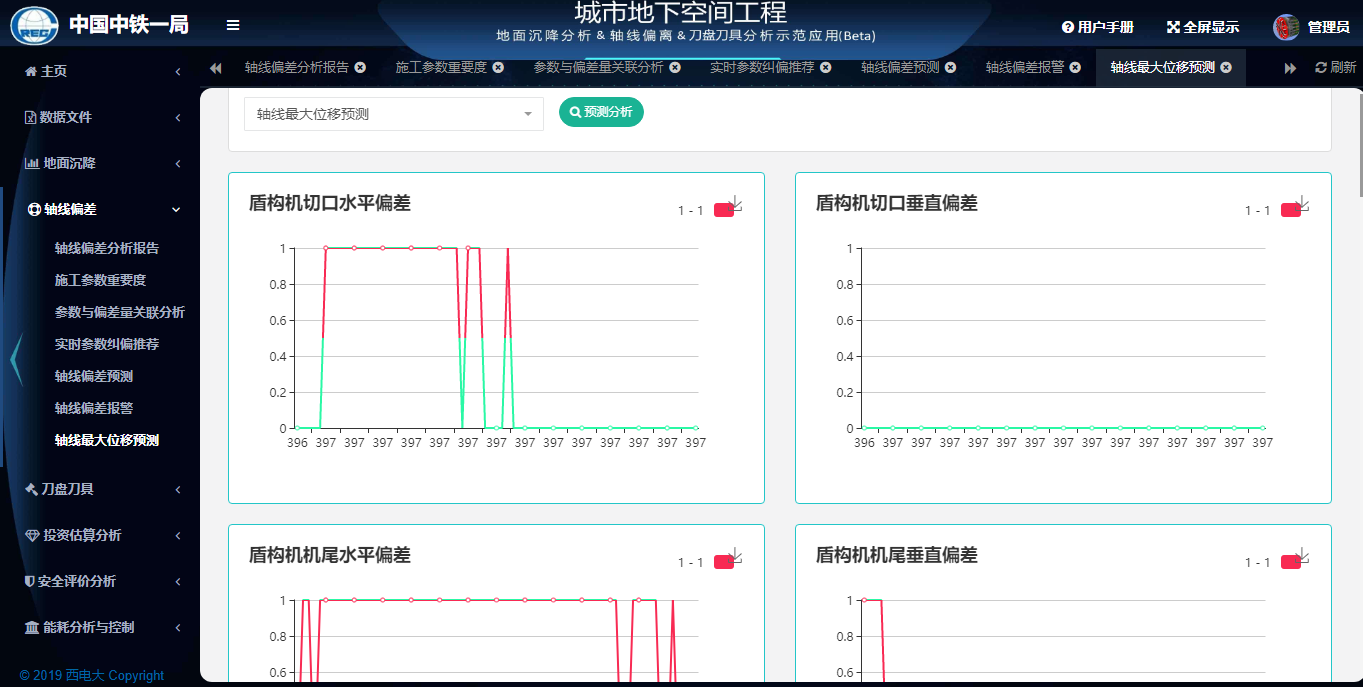
Digital Twin Platform for Shield Excavation
XIDIAN University Jan 2020 - Jun 2022
China International "Internet+" Innovation and
Entrepreneurship Competition Second PrizeWhat: Utilizing deep learning for the correction of tunnel boring machine excavation trajectories.
How:Considering the parameters obtained from various sensors on the tunnel boring machine, we have constructed track prediction and correction models through feature dimension reduction and extraction of important features. These models have been integrated into a cloud-based platform.
You can find more details here. -

Education & Intern
Experience
By reserved by time order

National University of Singapore
2024.8 - present MasterCurrently I am a Masters student in Biomedical Engineering at the National University of Singapore.
The Chinese University of HongKong, Shenzhen
2021.12 - 2023.9 Research Asisstant(Fulltime) Advisor: Prof. Zhuoran ZhangI had great experience working with Prof. Zhuoran Zhang. Professor Zhang's rigorous research spirit and excellent research taste have deeply influenced me. I have always followed Prof Zhang's research philosophy: from the clinics, to the clinics. This experience strengthens my problem-solving and communication skills and broadens my research horizons.

XIDIAN University
2018.09-2022.06 Bachelor Advisor: Prof. Pei WangI am lucky to follow WangPei who encourage me to go for professional competence. Professor Wang has led me forward in the field of Digital Twins and I have gained a lot.

Siemens Industry Software (Shanghai) Co., Ltd
2022.01 - 2022.02 Internship PPosition: Teamcenter Product Development InternshipResponsible for the secondary development and post-checking of functions in Teamcenter for enterprise needs; Preliminary data processing: interacted with clients for feed backs and assisted technical consultants in determining functional requirements and application logic; Responsible for setting relevant functional test data, and assisting clients in application data migration.
Services
[2018 - 2022] President of the XDU Painting and Calligraphy Association. I taught the members how to make rubber stamps.Pic1
[2019 - 2019] Robomaster against Robotics team members, Here's a video of us assembling the infantry robot.
Awards
🏆[2023] IEEE ROBIO 2022 conference oral presentation
🏆[2022] Second Prize in SSE Research Poster Competition in CUHKSZ
🏆[2022] Video Presentation Award-Second Place at the American Society for Reproductive Medicine's 78th ASRM Scientific Congress & Expo
🏆[2022] Outstanding Graduate of XDU(Top 1%)
🏆[2022] Outstanding Student of XDU(Top 5%)
🏆[2022] Second Prize of National University Student Social Practice and Science Contest on Energy Saving & Emission Reduction
🏆[2022] Director of Innovation and Entrepreneurship Training Programme for University Students
🏆[2021] Honorable Mention of the International Mathematical Contest in Modeling(MCM)
🏆[2021] Outstanding Student of XDU(Top 5%)
🏆[2021] Second Prize of the Chinese Mathematical Contest in Modeling(MCM)
🏆[2021] First Prize of Mechanical Innovation Design Competition in Shaanxi Province(Top 1%)
🏆[2020] Third Prize of the 12th Shaanxi Province Industrial Engineering Improvement Creativity Competition
🏆[2020] China International "Internet+" University Students Innovation and Entrepreneurship Competition silver medal
🏆[2020] Outstanding Student of XDU(Top 5%)
🏆[2019] College's Best Leadership Scholarship of XDU